接入 SDK
提供 C++ / Python SDK,帮助客户快速完成设备接入、能力调用与应用开发。
设备初始化
能力调用接口
ROS 2 原生兼容
树莓派 / IPC 支持
面向无人配送车、无人环卫车、搬运机器人场景
提供跨机体复用的环境理解与任务语义平台
一个大脑,适配多种低速车体

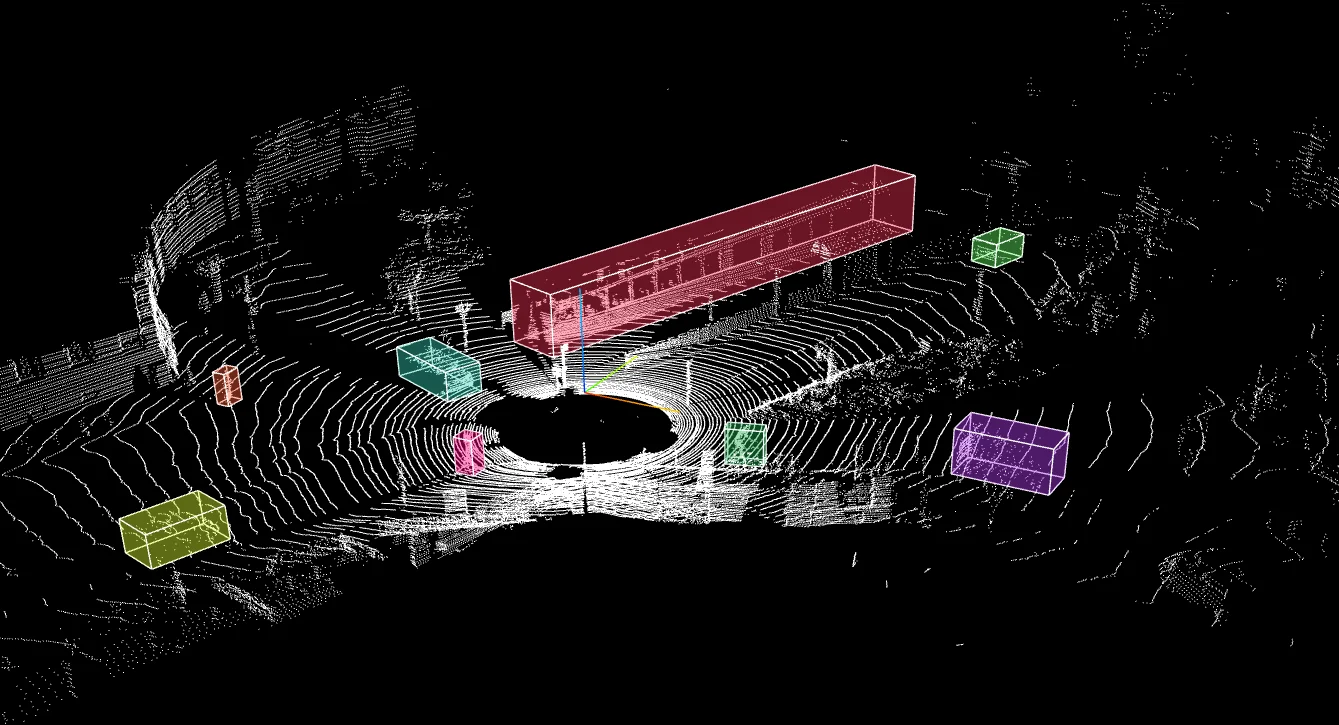
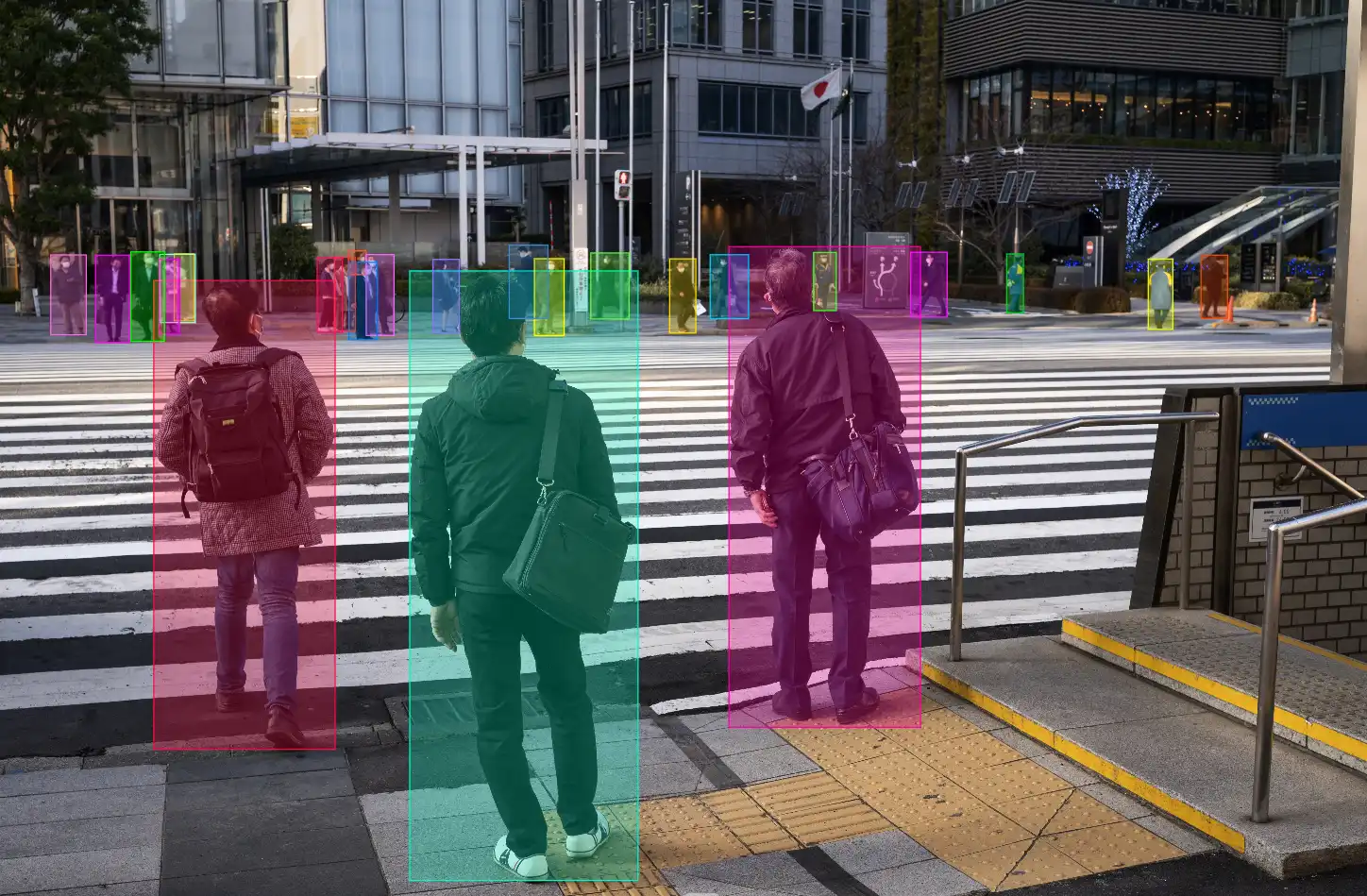
实时输出障碍物类别、可通行区域、动态轨迹、风险等级、停车原因与接管建议。
将视觉结果转译为对任务有意义的结构化语义,帮助机器人理解环境状态与动作建议。
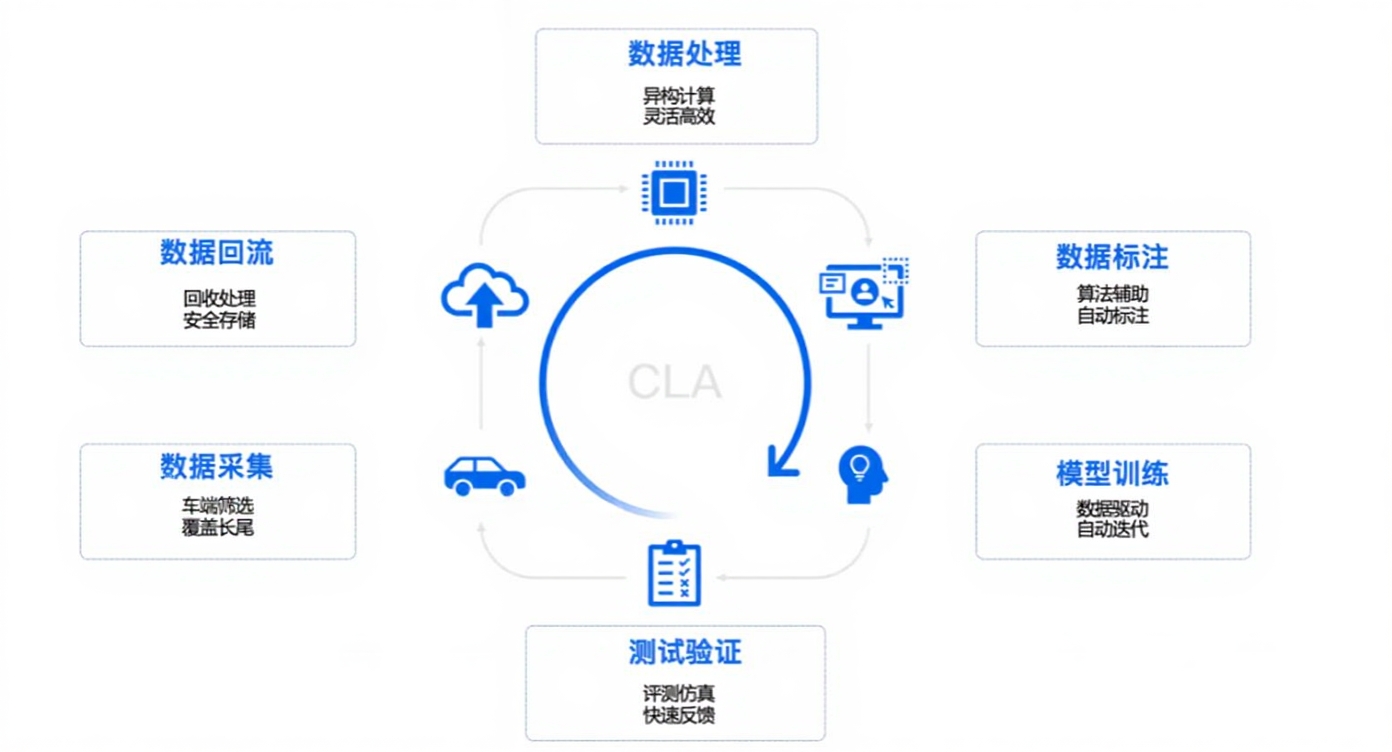
覆盖采集、筛选、标注、训练与更新流程,形成持续迭代的数据驱动能力。
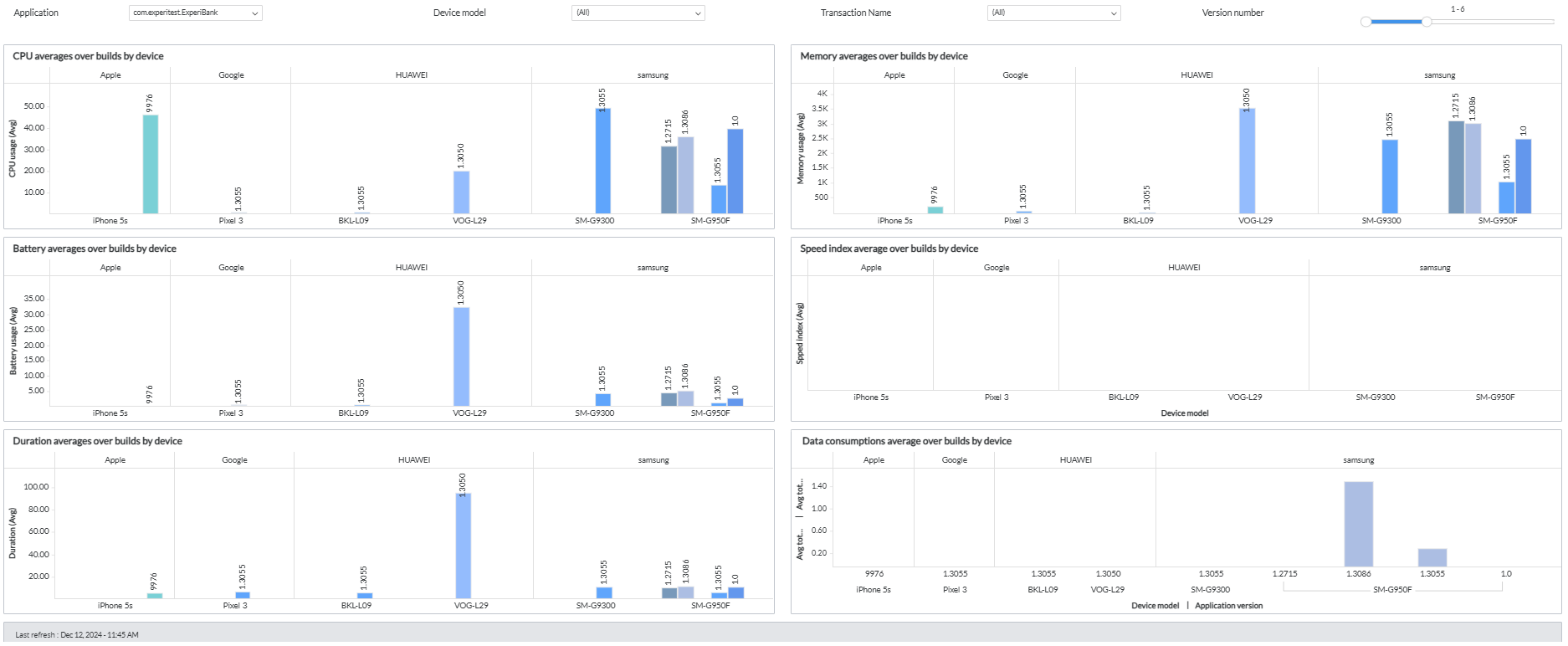
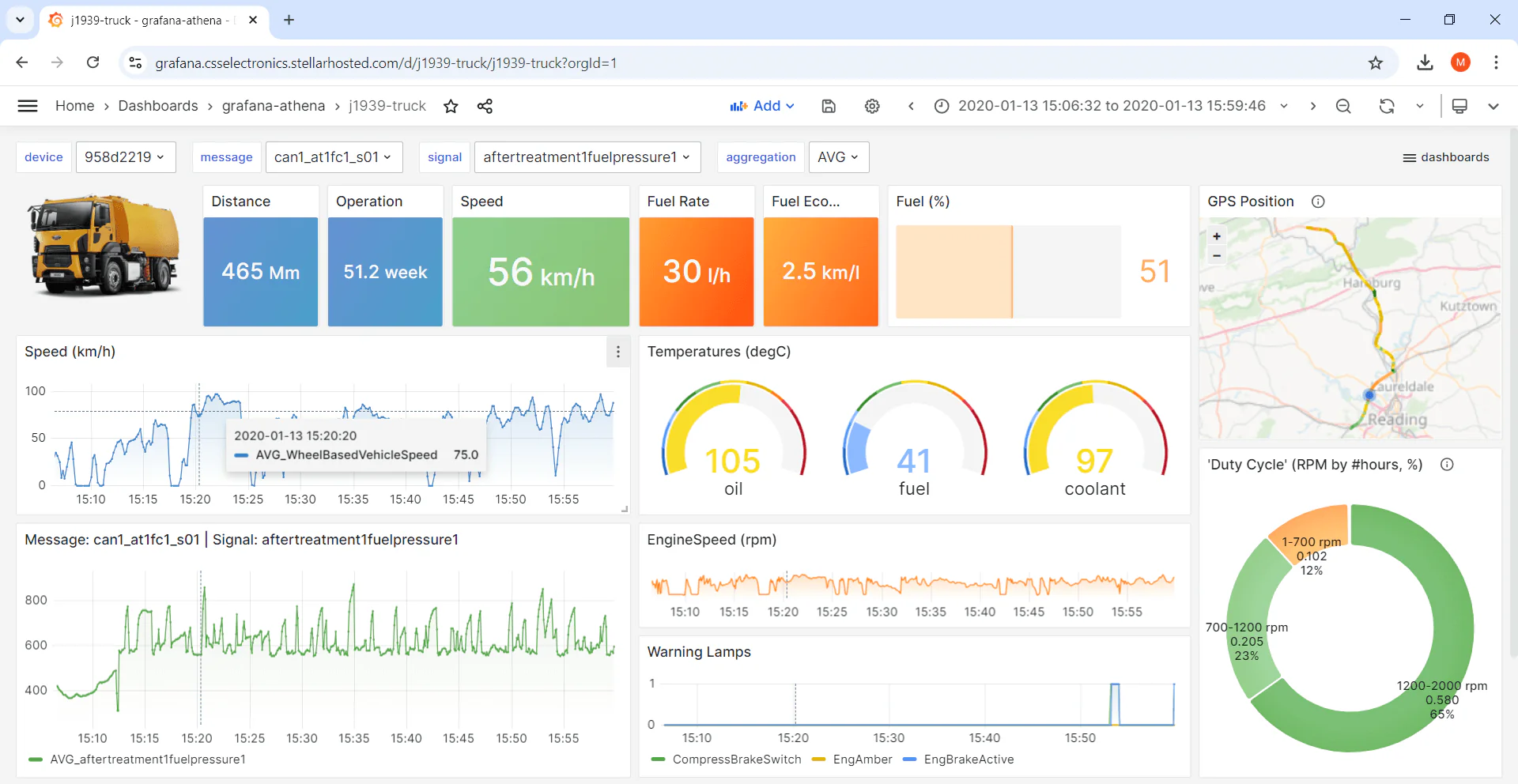
提供异常统计、停车原因报表、高风险路段热力图与版本效果对比,支撑规模化交付与运营。
一个大脑,四类场景,从环卫、配送到搬运与巡检

夜间 / 雨后反光、路面脏污、非结构化障碍较多。
环境鲁棒性优化,提升湿滑、污损与复杂光照下识别稳定性。

人车混行、临时占道、动态障碍物多,任务路线变化频繁。
动态目标轨迹预测 + 风险分级,实现更稳妥的通过与等待策略。

通道拥堵、装卸点位分散、任务路径切换频繁。
任务阶段识别 + 路径重规划,提升搬运通行效率与调度稳定性。

巡检区域跨度大、环境切换频繁、异常目标类型复杂。
多区域语义感知 + 异常目标识别,实现连续巡检与及时告警。
自建数据 AI 基地 · 机器人端侧视觉大脑的基石能力
多角度光照模拟、不同材质地面、人员操作 SOP 板与多机位采集流程,
为低速移动机器人训练提供高质量真实数据样本。

支持障碍物、可通行区域、语义属性与事件级标签的统一管理,
为模型训练、评估与版本发布提供规范化数据基础。
围绕接入、部署、调试与联调能力,构建面向客户与合作伙伴的开放生态。
提供 C++ / Python SDK,帮助客户快速完成设备接入、能力调用与应用开发。
支持标准 API、数据回传与控制联动,方便与车控、调度、云平台系统集成。
覆盖部署说明、接口手册、调试指南与典型场景示例,降低集成门槛。
提供联合调试、项目交付、生态共建与应用落地支持,提升合作效率。
汇集联合研发、产学合作、生态伙伴与资质成果,展现堃华科技在机器人视觉大脑方向的合作基础与阶段进展。
堃华科技(广州)有限公司成立于 2025 年 5 月,是由人工智能与机器人领域行业团队发起,专注于具身智能端侧视觉大脑方向的高科技企业。
公司致力于打造国内领先的机器人视觉感知与认知引擎,围绕机器人在真实复杂环境中的“看得清、看得懂、会判断、能行动”核心需求,构建集视觉感知、目标识别、空间理解与智能推理于一体的视觉大脑核心技术体系。
目前已与湖南大学共建具身智能联合研发中心,并与广州理工学院深入合作,共建具身智能视觉大脑采集训练中心及数据标注基地。