高性能推理
端端高效推理引擎,毫秒级响应,满足实时性要求

围绕环境感知、场景语义、数据闭环与运维运营能力,提供可跨机体复用的端侧视觉大脑平台,支撑低速移动机器人在真实复杂场景中的持续运行与稳定交付。
实时输出障碍物、通行区域、轨迹与风险等级
把视觉结果转成任务可用的结构化语义信息
覆盖采集、标注、评估、更新与交付运行能力
端侧视觉大脑覆盖感知、理解、规划、执行与持续学习能力。
融合相机、雷达等多源信息,实现复杂工况下环境感知。
构建路况语义图结构,解释前方事件与可通行区域。
高精度定位与实时建图,适配复杂动态环境。
基于优化算法的通行规则与行动决策,兼顾效率与安全。
精准驱动与执行,保障任务稳定完成与连续闭环。
数据闭环与模型迭代,持续提升智能水平与泛化能力。
模块化设计,灵活可扩展,满足多样化场景需求。
专为低速移动场景打造
端端高效推理引擎,毫秒级响应,满足实时性要求
支持相机、激光雷达、IMU等多传感器融合
模块轻量化与算法优化,适配多种算力平台
多重安全机制,保障系统稳定运行
标准API与SDK,开发便捷,快速落地
基于端侧实时部署与场景验证形成的能力指标示意。
端侧感知延迟
满足低速机器人实时作业要求
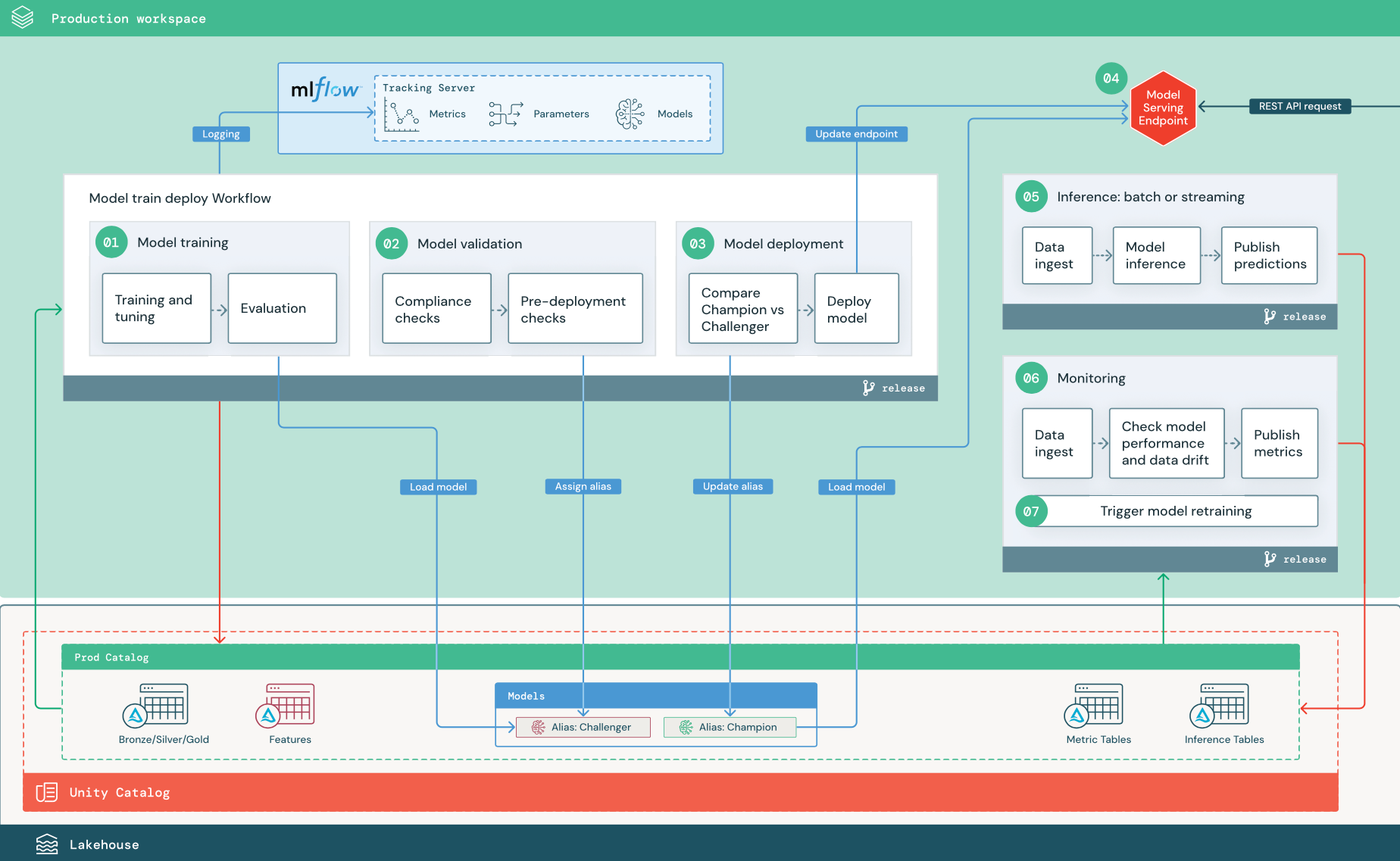
障碍物检测精度
多场景数据集持续验证

支持车体类型
持续扩展更多平台与外设

系统可用率
长周期运行下保持稳定输出
推理功耗优化
相比上一代平台进一步压缩功耗
围绕远程作业、精细操作与多模态数据采集,构建从主从遥操作到单臂训练采集的操作能力底座。
基于力反馈的主从式双臂遥操作,实现高精度动作复刻,适用于远程作业、精细操作等多场景。


单臂数采系统,视觉 + 力觉 + 动作多模态数据融合,精准采集位置、力矩、电流等全维度参数,为算法优化、结构设计提供数据依据,多场景赋能。

